システム情報工学 / 2021 制御バリア関数に基づく人間-ロボティックネットワーク系のシーケンス型持続的被覆制御
| 氏名 | 棚瀬 健 |
|---|---|
| 指導教員 | 藤田 政之 教授 |
| 研究室 | システム制御研究室 |
研究概要
現代の日本において,ドローンを用いた橋や建造物といった点検の需要が高まっている.本論文では広大な領域を複数の小領域に分割し逐次的に被覆を行うシーケンス型持続的被覆制御則を制御バリア関数に基づいて提案し,シミュレーションによってその有効性を検証した.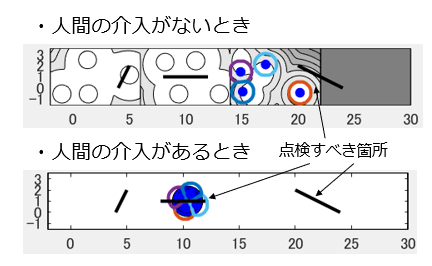
卒論の感想
半年という短い期間の中で,研究の仕方,論文の執筆,発表資料の作成と内容の濃い卒業研究となった.大変だったがとても有意義な時間を過ごせた.- TOP
- 制御バリア関数に基づく人間-ロボティックネットワーク系のシーケンス型持続的被覆制御