学位論文
ソフトロボティクス用センサの研究
- 染谷 優
- (指導教員:生田 幸士 教授、池内 真志 講師/システム情報第9研究室)
研究概要
ソフトロボティクスにおいて柔軟なセンサの開発が遅れている。本研究では、生田研究室で開発されている光ファイバに欠損を入れ作成された屈曲センサの理論モデルの提案と、その屈曲センサを複数配置して多次元化し形状を測定するセンサの設計・開発を行った。
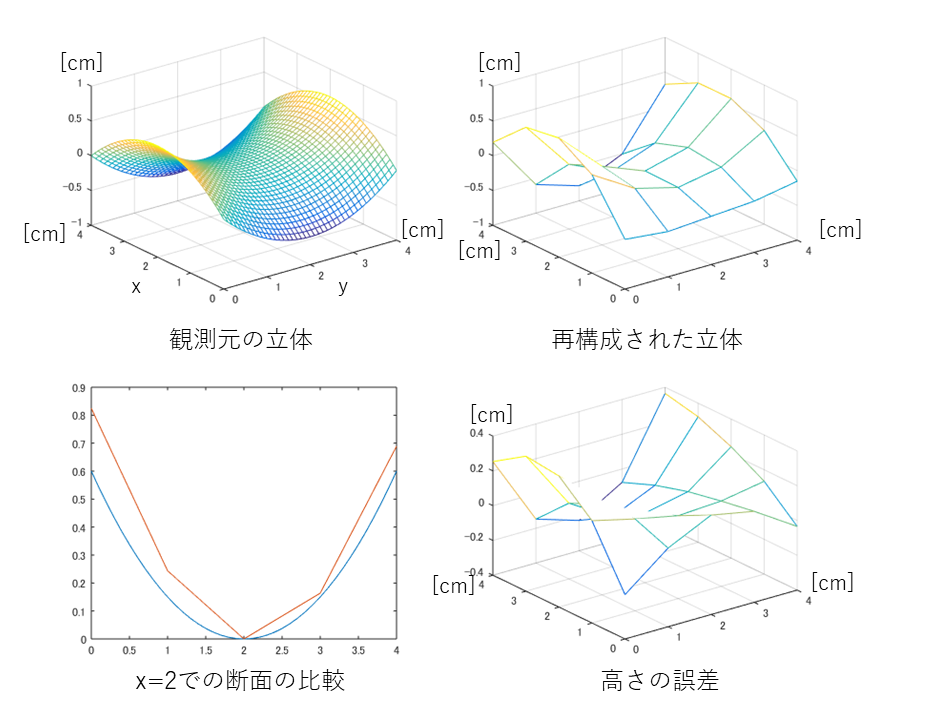
多次元化した屈曲センサを用いた捩れ形状の測定結果
卒論の感想
研究室の方々に非常にお世話になりながら研究の取り組み方を学ぶことができ、また研究に必要な忍耐強さを養うことができた有意義な半年間であった。
