システム情報工学 / 2008 自律機能を有する高速多指ハンドのテレマニピュレーション
| 氏名 | 竹下 佳佑 |
|---|---|
| 指導教員 | 石川 正俊 教授 |
| 研究室 | システム情報第6研究室 |
研究概要
従来のテレマニピュレーションシステムでは、マニピュレータが対象に接触している状態における制御に重点が置かれてきた。そこで、接触する瞬間の負荷を、視覚・力覚フィードバックを用いた自律的動作によって軽減することを目指した。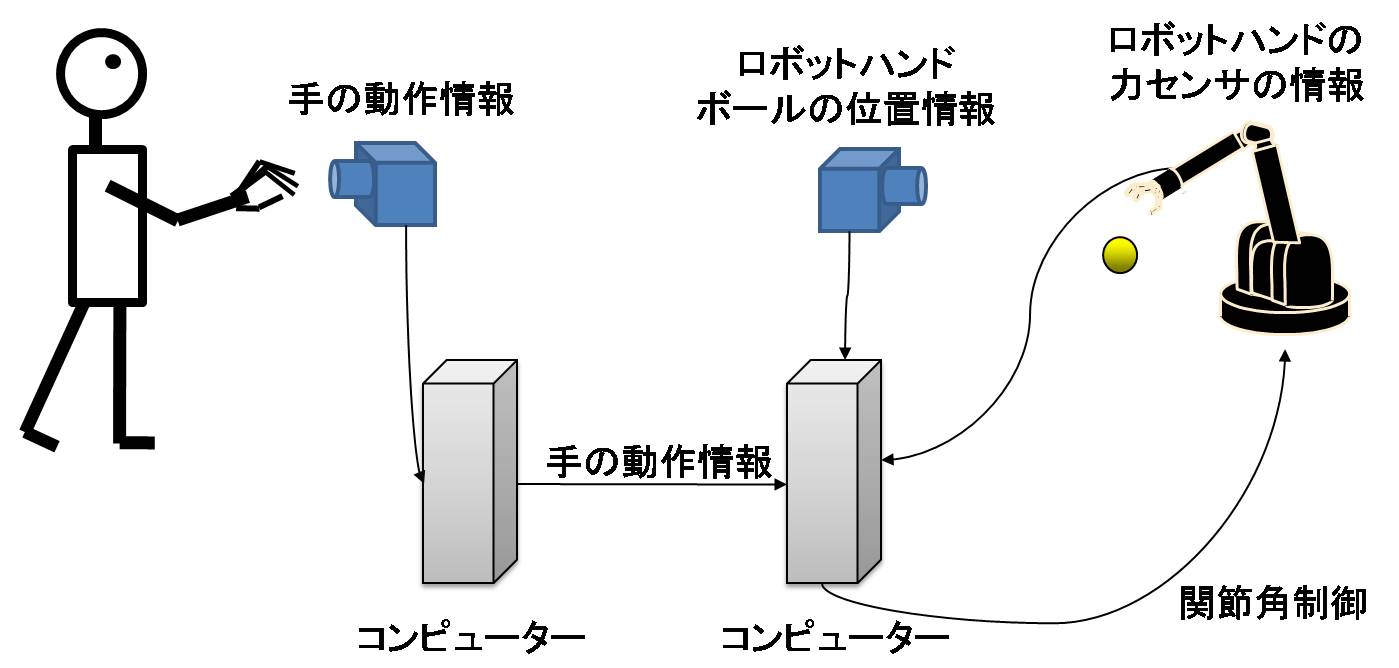
卒論の感想
研究をどのように進め、論文としてまとめ、成果として発表していくのかということを学ぶことができた半年でした。研究の内容自体よりも今後役立っていくことでしょう。- TOP
- 自律機能を有する高速多指ハンドのテレマニピュレーション