システム情報工学 / 2012 2自由度2脚ロボットによる空中転回
| 氏名 | 石橋 和磨 |
|---|---|
| 指導教員 | 奥 寛雅 講師 石川 正俊 教授 |
| 研究室 | システム情報第6研究室 |
研究概要
跳躍後の脚の開閉を利用した空中転回のための戦略を提案する。数値シミュレーションを行い入力トルクの影響を解析する。次に実際のロボットを開発し、シミュレーションを踏まえて動作を決定する。またビジュアルフィードバックによって離陸タイミングの正確な判定を行い、正確な空中転回を目指す。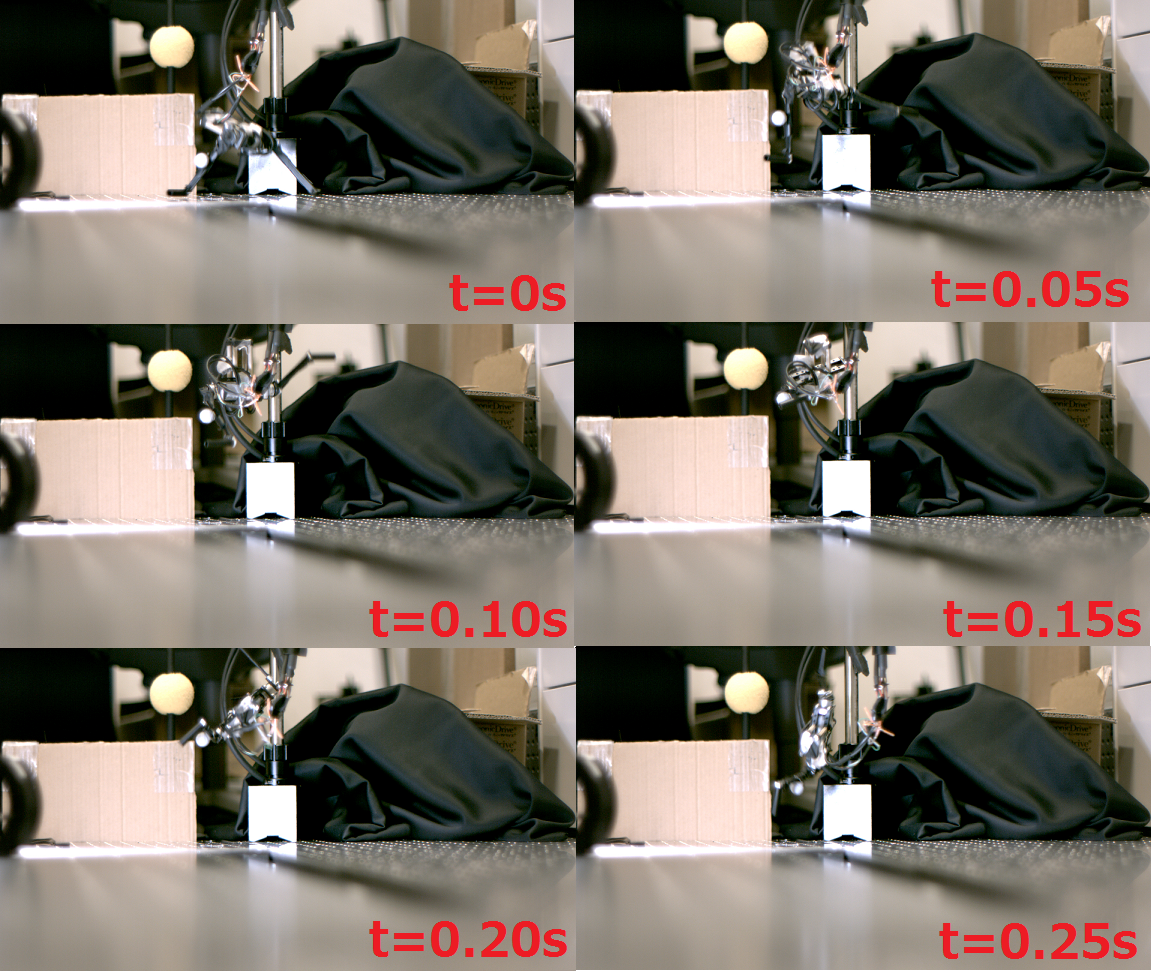
卒論の感想
ロボットに関する知識が殆どない状態でのスタートでしたが、研究室の方のご協力もあり研究を進めることができました。- TOP
- 2自由度2脚ロボットによる空中転回