学位論文テーマ一覧(システム情報工学)
RVMに基づく未知環境下での確率的安全性を保証した持続的被覆制御
- 廣畠 靖秀
- (指導教員:藤田 政之 教授/システム制御研究室)
研究概要
ロボットの安全性を保証しつつ未知環境内に複数ロボットを配置する被覆制御則を提案した.未知環境内でLiDAR等により得られるセンサ情報から満たすべき安全性制約を関連ベクトルマシン(RVM)により学習することで,確率的な安全性を保証した.
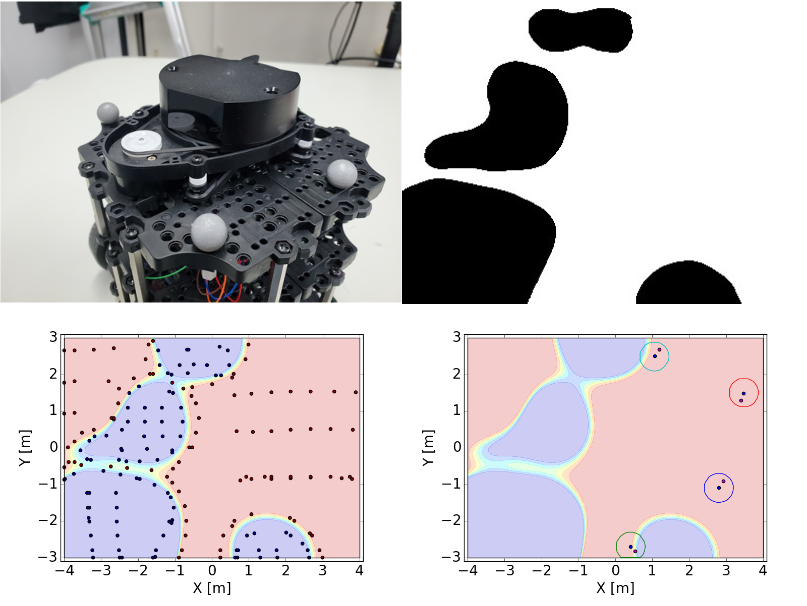
確率的な安全性を保証した被覆制御.
卒論の感想
半年という短い期間ではあったが,研究への姿勢や理論と応用の両方を研究することの意義と難しさを学ぶことができた.今後の研究に活きる多くの経験をし,有意義であった.
