学位論文テーマ一覧(システム情報工学)
多自由度手首装着型身体拡張ロボットハンドの設計
- 大澤 悠一
- (指導教員:稲見昌彦教授・門内靖明准教授/身体情報学研究室)
研究概要
人間拡張工学の分野では,余剰な身体部位を人体に取り付けることで人間が達成できるタスクの範囲を広げる研究が行われてきた.本論文では手首に装着する「第三の手」を提案するとともに,ユーザスタディを通して応用例となるようなタスクを探索した.
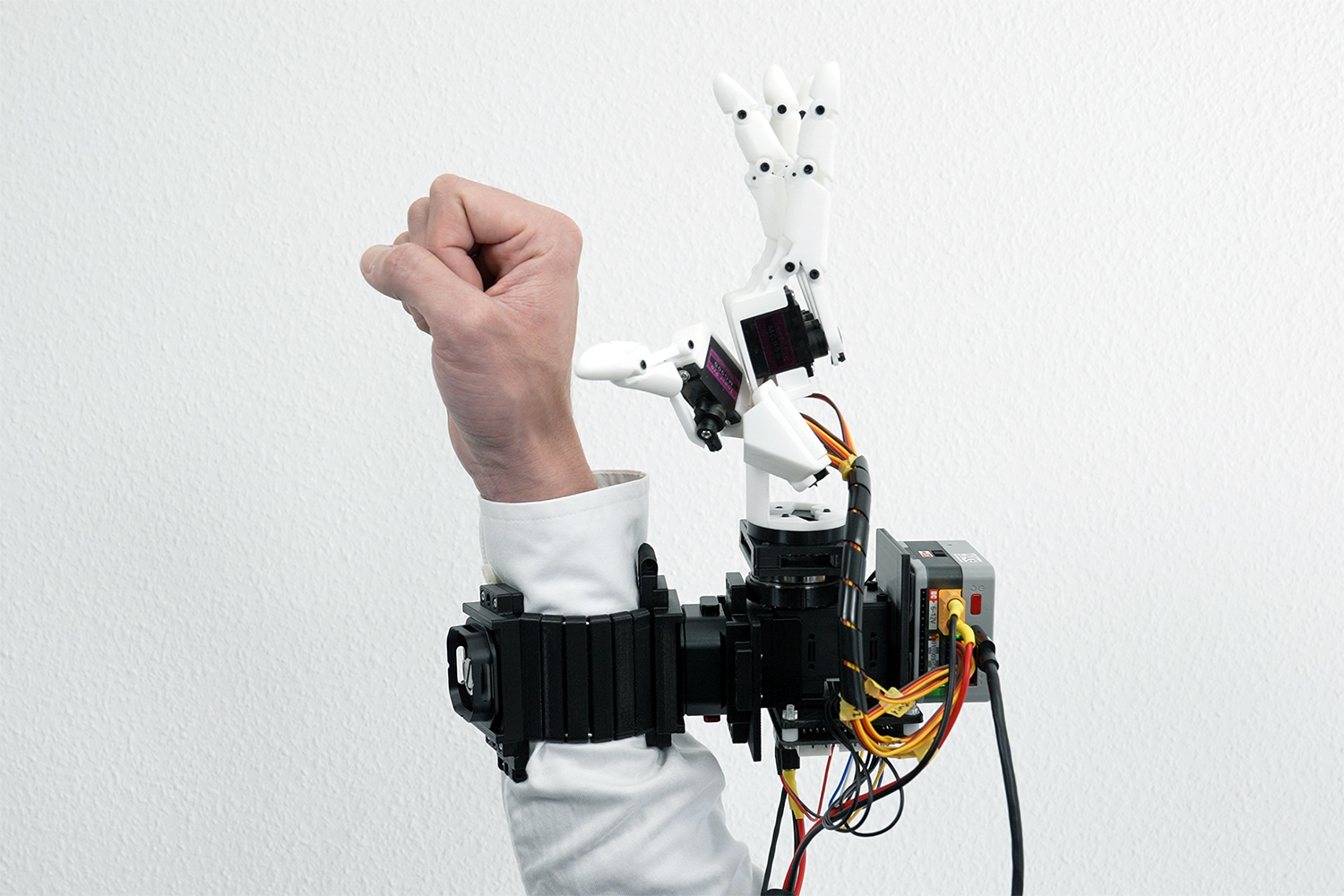
実際に作成した「第三の手」
卒論の感想
ドメイン知識からスライド資料の見せ方,論理構成の立て方など,初めて知ることばかりで学びの多かった半年間であった.短い期間だったが有意義であったと思う.
