インピーダンス制御とは,ロボットの手先に外から力を加えた場合に生じる機械的なインピーダンス(慣性,減衰係数,剛性)を,目的とする作業に都合の良い値に設定するための位置と力の制御手法のことである.ロボットの手先にバネやダンパなどの機械要素を取り付けて手先のインピーダンスを変更する受動インピーダンス法と,手先の位置,速度,力などの測定値を用いたフィードバック制御でインピーダンスを変更する能動インピーダンス法がある.研磨や組立などの接触作業を行う産業用ロボットや,人と直接触れ合う医療福祉用ロボットやアミューズメントロボットなどで用いられている.
月: 2018年1月
ハイブリッド制御
身の回りにある多くの動的システムには,実際には連続的な振る舞いと,状態のジャンプ,切り替えなどの不連続性が混在しているものである.そのような対象への制御方式をハイブリッド制御とよぶ.例として飛躍時と接地時で運動方程式が異なるジャンピングロボットの姿勢制御,バルブの中間的な開閉調整のできないタンクシステムの液量制御,主として離散状態からなる情報機器における信号の流量の制御など,適用範囲は非常に広い.中心課題は安定性の補償などであり,近年活発に議論されている.また離散凸最適化問題に対する解法の適用など,数値解析的アプローチも研究されている.
動的システム設計
制御対象のダイナミクスを表す数理モデルをもとに,制御系全体を設計することをいう.制御理論の中心課題であり,これまで様々な手法の提案,理論展開が行われてきた.1950年代以前は安定判別法,ボーデ線図に基づく周波数領域における制御系設計法,ステップ応答に基づくPID制御などが中心課題であり,古典制御と呼ばれている.1960年代に入り状態空間表現が導入され,可制御可観測性,極配置,最適レギュレータ・フィルタなどが中心課題となり,現代制御理論と呼ばれている.近年は実システムに対する高度な制御系の実現を目指して,モデルの不確かさを考慮したロバスト制御,H∞制御,適応制御,サンプル値制御,非線形制御など,より進んだ制御理論が開発され,さらに発展している.
モデリング・システム同定
制御器の設計は,制御対象のダイナミクスを表す数理モデルをもとに行われる.その土台となる数理モデルの導出は,制御系の目的,設計者の考えが反映されるものであり,その後の制御系設計の成否を左右する最も基本的かつ重要な過程であるといえる.ここでダイナミクスの構成要素の抽出,簡略化,統合を経て,制御対象の数理モデルを導出する過程をモデリングと呼び,数理モデル含まれる未知パラメタを,制御対象の入出力信号のデータを用いて推測することをシステム同定と呼ぶ.後者においては最小二乗法,多入出力系の同定手法である部分空間法,有限データから考え得る全ての数理モデルを集合として与えるロバスト同定法など,様々な手法が提案されている.
ヤコビ行列
一般に,ロボットマニピュレータの関節角度と手先の位置や姿勢は,三角関数を含む非線形な関係として表される.そのため,手先の位置や姿勢の値から関節角度の計算(逆運動学計算)は解を求めるのが煩雑となる場合が多い.一方,関節角の微小変化と手先の位置や姿勢の微小変化の関係は,ヤコビ行列(ヤコビアン)と呼ばれる行列によって線形関係として表されるので扱いやすい.ここで,ヤコビ行列とは,手先の位置や姿勢を表すベクトルの関節角度による編微分で与えられる.そのため,ヤコビ行列は,手先位置のフィードバック制御などの多くの制御手法で用いられている.一方,画像上の特徴量の微小変化とマニピュレータの関節角の微小変化の関係を表す行列は画像ヤコビアンと呼ばれ,ビジュアルサーボで多用されている.
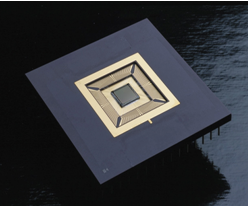
ビジョンチップ
画像処理に要する時間を少なくするために,フォトダイオードなどの光検出器と,画像処理を行う処理回路を1チップに集積化した知能化センサである.処理回路にアナログ回路を用いたタイプと,ディジタル回路を用いたタイプが存在する.前者では,回路のサイズを小さくできる一方,特定の画像処理にしか対応できない.後者は,回路サイズが大きくなるが,プログラマブルで汎用の画像処理に対応可能である.写真は,64×64画素の並列処理回路を備えた超高速超並列ディジタルビジョンチップである.フォトダイオードと処理回路を画素ごとに直結したものを1チップに集積化することで,従来のビデオフレームレートによる制約をはるかに越える高速リアルタイムビジョンシステムを実現している.
ビジュアルサーボ
ビジュアルサーボとはフィードバック制御ループにビジョンによる画像情報を組み込んだサーボ制御系である.視覚による認識とロボットの制御を同時に行うので,変化する環境に対応した作業を行うことが可能となる.ステレオ視などの方法を用いて計算した対象の3次元位置情報に基づいてロボットを制御する位置ベース法と,画像上の特徴量から直接ロボットを制御する特徴ベース法が提案されている.どちらの場合でも,画像処理に時間がかかりすぎると,サーボループのゲインが上げられず,ロボットの応答性能を高めることができない.この問題に対して,画像処理を1msで実現可能な高速ビジョンシステムの導入が注目されている.写真は,高速ビジョンシステムを搭載した2自由度ターゲットトラッキングシステムである.

センサフュージョン
人間は 視覚,聴覚,触覚,味覚,嗅覚の五感に代表される多くの感覚情報を用いることで,外界の変化や自分の状態を認識している.多数の情報を融合し,欠落した情報を相互に補完することで,より信頼性の高い情報を得ることが可能となる.センサフュージョンとは,人間の感覚統合機能を工学的に実現することであり,複数の感覚情報に対して統合的・融合的な処理を施すことにより, 単一の感覚のみでは得られない新たな認識能力を実現し,柔軟な学習能力を持つ階層分散処理系を実現する. センサフュージョンの例としては,ロボットハンドの視触覚融合が挙げられる.ロボットハンドで物体を操作する場合には,視覚情報と触覚情報を適切に融合させて物体の形状を認識し,最適な位置で把握することが必要となる.写真は視覚センサと力センサを備えたロボットハンドで対象を握っている例である.

サイバネティックス(Cybernetics)
N. Wiener が1940年代に提唱した,新しい研究領域「動物と機械における制御と通信」に関する総称,もしくは「考え方」である.1948年に同氏により出版された本に詳しく,理工学の分野に大きな影響を及ぼした.主としてシステムに関する境界領域にある問題や,多くの分野に共通する普遍的問題の解決のため創出され,フィードバックを基本とした制御の構造や,情報量に基づいたシステム構成の合理性が,機械,生物,社会システムなど,身の回りのあらゆるものに普遍的に存在することを解き明かす学問(考え方)といえる.近年,高度情報化社会が進むにつれ,改めて本学問の重要性が見直されつつある.「サイボーグ」,「サイバーパンク」など「サイバー」の語源.
自律分散システム
分散配置された要素をネットワークなどで結合したシステム.ただし,新規結合や結合の切断があっても定常性を失わない性質が要求される.簡単にいえば,「一人でも生きられる」ことを自律と呼ぶ.これは,「一人で生きる」ことである独立とは異なる.このような自律性を持った要素を結合したり,切断することで拡張性や柔軟性を持たせることを特色としている.新幹線やJRの電車などの運行制御などに使われている.